
Other

“Superior Boy is Cybersecurity, education, and research in one advanced device. Everything a mobile cybersecurity pro needs. Superior Boy, combining the power of RP2040 and ESP32 microcontrollers, encompasses all the hardware and features that a cybersecurity expert would need on …

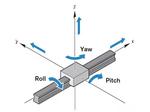
“Learn how to make a compass by accurately estimating the heading angle from the MPU9250 magnetometer. The MPU9250 is a compact and versatile motion tracking device that combines a 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer into a single package …

“It is an Open Source DIY- project. It can maintain its own balance and can be controlled remotely via Bluetooth connection. LOTP Two-Wheeled Self-Balancing Robot Project is an open source –DIY- project. It can maintain its own balance and can …

“Modular Autonomous Quadruped Robot Project(Open Source) DESCRIPTION - Designed with Fusion 360® - Coded in Arduino language on Teensy 3.5 & Arduino - Modular structure (Lidar, Drone, Gas detection) - Autonomous features (Avoiding obstacle, maintain balance, pressure control) - PI (Proportion - Integral) control - Inverse …
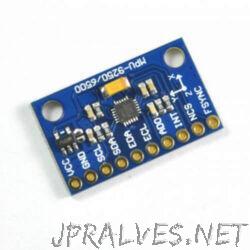
“MPU-9250 is one of the most advanced combined accelerometer, gyroscope and compass small size sensors currently available. It replaces the popular MPU-9150 lowering the power consumption, improving gyro noise and compass full scale range performance. It has many …

“MPU-9250 is one of the most advanced combined accelerometer, gyroscope and compass small size sensors currently available. It replaces the popular MPU-9150 lowering the power consumption, improving gyro noise and compass full scale range performance. It has many …

“Understanding MPU9250: wiring, coding and testing MPU-9250 is one of the most advanced combined accelerometer, gyroscope and compass small size sensors currently available. It replaces the popular MPU-9150 lowering the power consumption, improving gyro noise and compass full …

“MPU9250 & MPU9265 calibration 9-DOF Gyro Accelerator Magnetometer Module with Arduino on Unity 3d A method for calibrating an on-body 9 Degree of Freedom (DOF) Inertial Measurement Unit (IMU) is proposed. The proposed system uses a single 3D position sensor …

“ESP32 small robot dog is my attempt to make quadruped dog that become very popular after Boston Dynamics Spot. Work on the project still in progress and hardware and software can changed. Features - Only ESP32 required (you don’t need …

“If you can’t fix it in software you’ll have to fix it in hardware in this case. Hence the NMEAtor. I’ve an old Robertson data network on board feeding the on board devices with NMEA0183 v1.5 …