
“MPU-9250 is one of the most advanced combined accelerometer, gyroscope and compass small size sensors currently available. It replaces the popular MPU-9150 lowering the power consumption, improving gyro noise and compass full scale range performance. It has many advanced features, including low pass filtering, motion detection and even a programmable specialized processor.
Internally it includes the MPU-6500, which contains a 3-axis gyroscope plus a 3-axis accelerometer, and the AK8963, the market leading 3-axis digital compass. The MPU-9250 uses 16-bit analog-to-digital converters (ADCs) for digitizing all 9 axes.
The MPU-9250 is a high performance accelerometer, gyroscope and magnetometer option for use in applications such as gesture recognition, self-balancing robots, cell phones, fitness monitoring and similar applications where detection of movement direction and magnitude along with rotation is desired. In reading MPU9250 sensors with Arduino article we’ve introduced the module and how to interact with it. As well as, the use of complementary filter to get the relative position. Let’s now see the full power of MPU9250 module: the mixed use of gyroscope, accelerometer and magnetometer to get real-time accurate position.
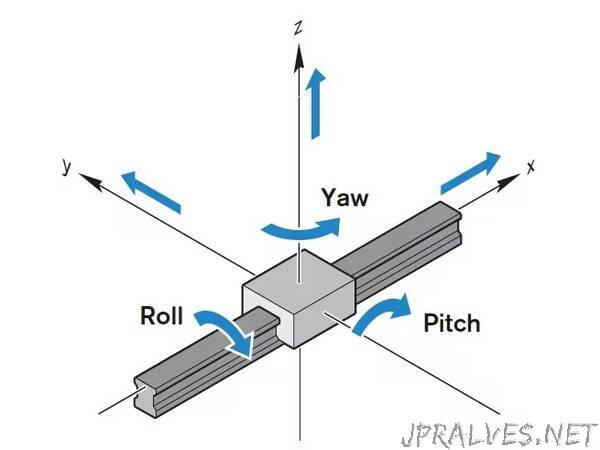
Gyroscope
A gyroscope is a device used for measuring or maintaining orientation and angular velocity. Measured in degrees (or radian) per second, angular velocity is the change in the rotational angle of the object per unit of time.
Acceletometer
Accelerometer sensors are integrated circuits (ICs) that measure acceleration, which is the change in speed per unit time. Measuring acceleration makes it possible to obtain information such as object inclination and vibration.
Commonly, g is used as a unit for acceleration, relative to standard gravity (1g = 9.80665m/s2).
Magnetometer
Magnetometer provides information about the magnetic field detected by the device sensor, and in theory, can expose location of a user. The magnetometer sensor measures the magnetic field for all three physical axes (x, y, z) in μT (micro Tesla).”