
Other

“This project is a complete design of a high-power three-channel LED driver board, designed in KiCAD, and all the fabrication files Introduction I have been thinking about how to drive RGB LED patterns most simply. In my day-to-day research, I …

“Collect analog date by the Arduino send then through Modbus rs485 to PLC and show them on SCADA through Modbus rs232 ABSTRACT PLC technology “Programming ControlSystem” is quite an interesting and crucial type of modern automation innowadays factories and industries …

“A smart home interface for Sofar solar and battery inverters. Supported models:ME3000SP and HYD-xx00 Sofar2mqtt is a remote control interface for Sofar solar and battery inverters. It allows remote control of the inverter and reports the invertor status …

“You’ll learn how to create an automation system to communicate 3 Arduinos via RS485. What project will you develop? The project consists of 3 Arduino’s. We have an Arduino UNO, a Nano, and a MEGA. The Arduino UNO …

“Applying IoT Technologies to revive an old SCADA Telemetry System I took up a challenge from an oil/gas client to revive a GSM based SCADA system that they had inherited, and to do so at very low cost. The …

“This project describes the development of a fully functional animatronic prototype. It is implemented from scratch and it aims to be a guide for the development of future more complex animatronic robots. The system is based on an Arduino microcontroller …

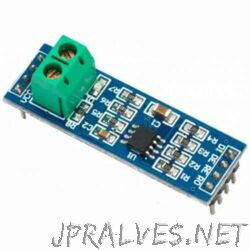
“Arduino Nano RS485 shield will help you to transmit and receive serial data using the twisted pair RS485 network. The module provides half-duplex communication. LED D1 indicates receive data, D2 Transmit LED, J1 jumper is optional and not in use …

“The objective is to find an easy way to implement RS485 on an Arduino Uno, then to adapt it to an ESP8266. The anemometer will be a part of a bench of measures that will be added to the wind …
“Transmit DMX over NRF24L01 to an Arduino controlled relay module Step 1: Materials - 2x Adruino Uno - 2x NFR24L01 2.4GHz Module - 2x Socket Adapter plate Board for 8Pin NRF24L01 Module - 2x MAX485 Module - 1x 5v Relay Module - 1x TM1637 4 …

“Sometimes we need to connect Arduino boards located far away from each other. The RS485 is a very convenient way to connect the boards with just 2 wires, and can work to a distance of 1200m (4000 ft). It also …

“RS232 is one of the most used, easy to develop and easy to apply communication protocol. We generally encounter to this standard at the MCU applications. But it has some restrictions. It allows us to use maximum 15 meters cable …

“Here we are going to interface a MSP430 Launchpad with a RS485 transceiver chip like MAX485 and communicate with an x86 PC. Serial(TTL) or RS232 protocol is fine if you are planning to communicate over short distances of a …

“This tutorial serves as a short introduction to Robotics using MSP430 microcontroller and Launchpad development board from TI.Here we will build a small differential powered robot from scratch using MSP430G2553 controller and L293D motor control chip.”