
“Intel introduced the 8086 microprocessor in 1978 and it had a huge influence on computing. I’m reverse-engineering the 8086 by examining the circuitry on its silicon die and in this blog post I take a look at how conditional jumps are implemented. Conditional jumps are an important part of any instruction set, changing the flow of execution based on a condition. Although this instruction may seem simple, it involves many parts of the CPU: the 8086 uses microcode along with special-purpose condition logic.
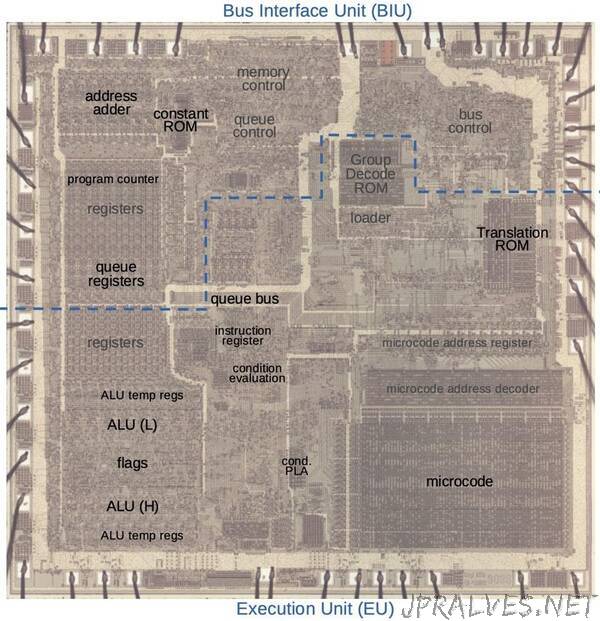
The die photo below shows the 8086 microprocessor under a microscope. The metal layer on top of the chip is visible, with the silicon and polysilicon mostly hidden underneath. Around the edges of the die, bond wires connect pads to the chip’s 40 external pins. I’ve labeled the key functional blocks; the ones that are important to this discussion are darker and will be discussed in detail below. Architecturally, the chip is partitioned into a Bus Interface Unit (BIU) at the top and an Execution Unit (EU) below. The BIU handles memory accesses, while the Execution Unit (EU) executes instructions. Most of the relevant circuitry is in the Execution Unit, such as the condition evaluation circuitry near the center, and the microcode in the lower right. But the Bus Interface Unit plays a part too, holding and modifying the program counter.
Microcode
Most people think of machine instructions as the basic steps that a computer performs. However, many processors (including the 8086) have another layer of software underneath: microcode. One of the hardest parts of computer design is creating the control logic that directs the processor for each step of an instruction. The straightforward approach is to build a circuit from flip-flops and gates that moves through the various steps and generates the control signals. However, this circuitry is complicated, error-prone, and hard to design.
The alternative is microcode: instead of building the control circuitry from complex logic gates, the control logic is largely replaced with code. To execute a machine instruction, the computer internally executes several simpler micro-instructions, specified by the microcode. In other words, microcode forms another layer between the machine instructions and the hardware. The main advantage of microcode is that it turns design of control circuitry into a programming task instead of a difficult logic design task.
The 8086 uses a hybrid approach: although the 8086 uses microcode, much of the instruction functionality is implemented with gate logic. This approach removed duplication from the microcode and kept the microcode small enough for 1978 technology. In a sense, the microcode is parameterized. For instance, the microcode can specify a generic Arithmetic/Logic Unit (ALU) operation, and the gate logic determines from the instruction which ALU (Arithmetic/Logic Unit) operation to perform. More relevant to this blog post, the microcode can specify a generic conditional test and the gate logic determines which condition to use. Although this made the 8086’s gate logic more complicated, the tradeoff was worthwhile.
Microcode for conditional jumps
The 8086 processor has six status flags: carry, parity, auxiliary carry, zero, sign, and overflow.1 These flags are updated by arithmetic and logic operations based on the result. The 8086 has sixteen different conditional jump instructions2 that test status flags and jump if conditions are satisfied, such as zero, less than, or odd parity. These instructions are very important since they permit if statements, loops, comparisons, and so forth.
In machine language, a conditional jump opcode is followed by a signed offset byte which specifies a location relative to the current program counter, from 127 bytes ahead to 128 bytes back. This is a fairly small range, but the benefit is that the offset fits in a single byte, reducing the code size.3 For typical applications such as loops or conditional code, jumps usually stay in the same neighborhood of code, so the tradeoff is worthwhile.
The 8086’s microcode was disassembled by Andrew Jenner (link) from my die photos, so we can see exactly what micro-instructions the 8086 is running for each machine instruction. The microcode below implements conditional jumps. In brief, the conditional jump code (Jcond) gets the branch offset byte. It tests the appropriate condition and, if satisfied, jumps to the relative jump microcode (RELJUMP). The RELJMP code adds the offset to the program counter. In either case, the microcode routine ends when it runs the next instruction (RNI).”