
“In this project, we’ll explore how to create a high-performance stepper motor driver circuit using the TMC2209.
Circuit Connection
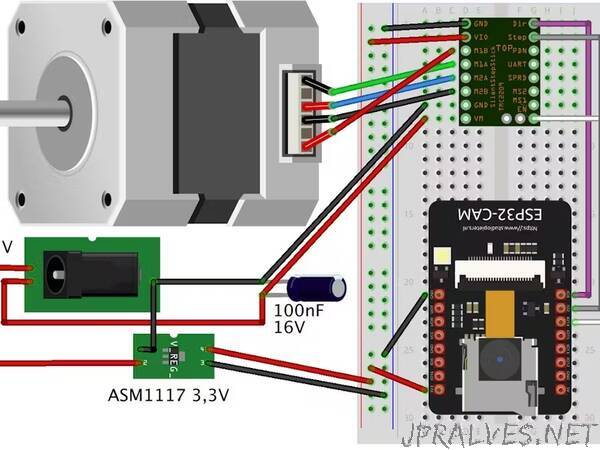
Connect the TMC2209 as follows:
1. Power Supply Connections:
- Connect the VBB/VCC pin to the positive terminal of the power supply.
- Connect the GND pin to the ground of the power supply.
2. Motor Connections:
- Connect the motor coils to the corresponding pins on the TMC2209.
- Ensure proper polarity and coil pairing.
3. Microcontroller/Arduino Connections:
- Connect the STEP pin to the digital output pin of the microcontroller.
- Connect the DIR pin to the digital output pin for direction control.
- Optionally, connect the EN pin to disable/enable the motor driver.
4. Cooling:
- Attach a heat sink to the TMC2209 to dissipate heat during operation.
5. Sensorless Homing (optional):
- Utilize the DIAG pin for sensorless homing functionality by connecting it to an end stop or microcontroller input.
Programming:
Utilize the appropriate library or write code to control the stepper motor using the microcontroller or Arduino. Implement micro stepping, stall detection, and advanced configuration settings based on your project requirements.
Testing:
Upload your code to the microcontroller, power up the circuit, and observe the stepper motor’s movement. Verify that the TMC2209 operates silently and efficiently using its advanced features.
Notes:
The TMC2209 supports various micro-stepping configurations for smooth and precise motor movement.
Take advantage of sensorless homing for applications where physical end stops may not be suitable.
“