
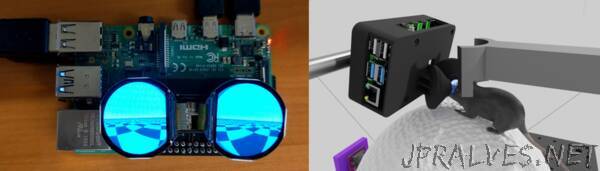
“The mouseVRheadset is a VR system for mouse neuroscience and behavior research. By positioning the headset to the eyes of a head-fixed mouse running on a treadmill, virtual scenes can be displayed to the mouse in both closed-loop (treadmill motion controls the visual scene) and open-loop (visual scenes unaffected by movement) modes. The headset is powered by a Raspberry Pi 4, Godot video game engine, and a custom display driver for controlling each eye’s display. A 3D printed case holds the Raspberry Pi and display eyepieces — each eyepiece containing a circular display and Fresnel lens to cover a wide field-of-view (~70 deg solid angle) of the mouse eye and put the visual scene at a focal length of [approximately] infinity.
The heart of the mouseVRheadset is a Raspberry Pi 4 running the Godot video game engine. Since the displays are relatively low resolution (240x210), an inexpensive single-board computer like a Raspberry Pi 4 is all that’s needed to effectively render visual scenes at high (>60 fps) framerates. The multiplatform game engine Godot makes it easy to create virtual scenes and develop experimental protocols. Examples included in this repo are experiments for visual cliff avoidance, reactions to looming stimuli of various size/velocity ratios, and the syndirectional rotational optomotor response to gratings of various spatial wavelengths. The views rendered for each display are controlled by separate in-game cameras which can be tied together to match the inter-eye distance and angle of a typical mouse. Custom display shaders warp the view from each camera to match the spherical distortion of the Fresnel lenses, intended to create a realistic and immersive experience for the mouse.
Based on a “blazing fast” display driver for SPI-based displays, the driver included in this repository works by copying the HDMI framebuffer and streaming the image data to the connected displays connected on the Raspberry Pi’s SPI port. This means that the headset displays are not limited to displaying what is rendered by Godot; in fact, whatever is displayed on the central 240x420 (WxH) pixel region of the screen is going to be streamed to the displays. This means if you want to create images or video with some other program, you just have to position it in the center of the display for it to be sent to the displays — the top 240x210 sent to display 0 (on SPI0 chip-select 0) and the bottom 240x210 to display 1 (on SPI0 chip-select 1).
To create an immersive, wide field-of-view (FOV) VR headset from the dual-display Raspberry Pi, a 3D-printed headset case angles the displays inwards and sets them behind Fresnel lenses. These lenses serve two functions: to allow the displays to be positioned very close (<15 mm) to the mouse’s eyes while still maintaining a comfortable infinity focal distance, and to spherically distort the displays to cover a wide FOV around each eye. Viewing angles from 0-70 degrees (0-52.5 degrees on the chipped side of the circular display) are linearly mapped onto the 240x210 circular display, resulting in an angular resolution of ~0.58 deg/pixel. With the 2 displays angled 45 degrees inward from straight ahead, the binocular headset covers a wide FOV: 140 degrees vertical and 230 degrees horizontal, with ~15 degrees of binocular overlap. Even greater horizontal FOVs are possible with greater display angles.
Our VR headset was developed and tested using a spherical treadmill setup as described here for closed-loop VR experiments. This treadmill simulates 2D navigation to a head-fixed mouse, allowing ground translation and yaw rotation. The treadmill motion is measured using optical sensors pointed at the treadmill along axes that are orthogonal to each other, acquired by a microcontroller (in our case, an Arduino Due). The microcontroller then converts these two sources of horizontal and vertical optic flow into treadmill spherical rotations: yaw, pitch, and roll. These rotation values are then sent to the Raspberry Pi over USB through computer mouse emulation: yaw rotations mapped as mouse x movement, pitch as mouse y movement, and roll as mouse scroll wheel movement. The Godot game engine converts these detected mouse movement events into the appropriate camera movements in the virtual scene. This setup allows the human user to test the game environments and experiments using a standard computer mouse or touchpad, and to use this VR system with any type of treadmill controll system that can be translated through a mouse emulator. See here for our Arduino Due code for measuring ball motion and mouse emulation.
In addition to the VR headset system, a monocular display can be built using a single display, lens, and microcontroller. Where the headset is ideal for complex virtual reality experiments and behavioral research, the monocular display is ideal for simple visual stimulation for basic visual neuroscience applications. The fast microcontroller Teensy4.0 and Adafruit graphics library is used to display simple shapes and moving patterns such as flickers, edges, and drifting gratings.”