
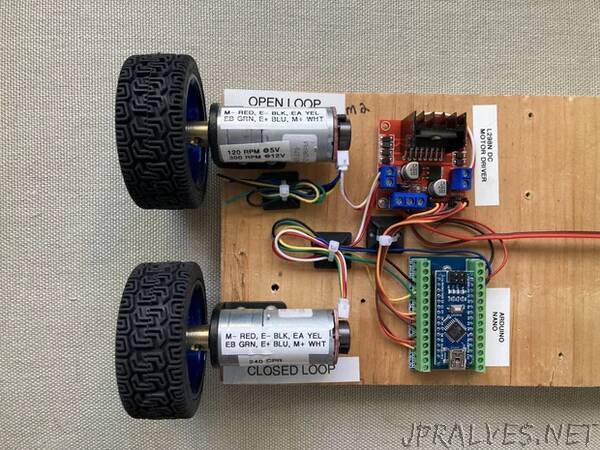
“This is a hands-on demonstration of DC Motor Open Loop vs Closed Loop control. Students can simply touch the tires (or use a pencil etc.) and feel the difference between them. There are two very low power motors/tires. One has Open Loop control, and is not as strong.The other has Closed Loop control and increases the voltage when you interfere to try and keep the speed constant. Both can be stopped easily if you grab hard enough, but you can feel the difference.
There is a simple explanation accompanying the demonstration to cover the concept quickly and refer the students out for more in-depth info (see below). I avoided the more advanced concepts of PWM and PID for this level (a FIRST FRC club).
The overall cost is very low since it does not use any industrial motor controllers - just an Arduino to do the Closed Loop corrections.
Supllies:
- Arduino Nano - An Uno is fine too - they have the same specs.
- Arduino Nano Terminal Shield - not necessary, but makes connections a bit easier. An Uno with Dupont jumpers would be fine also.
- L298N Dual H Bridge Motor Driver
- Motors with Wheels - some keywords are “DC 6V DIY Encoder Gear Motor with Mounting Bracket 65mm Wheel”. The ones I used were listed at 120 RPM, but a similar one would be fine.
- Wires, zip ties and mounts etc. and a 12V battery”