
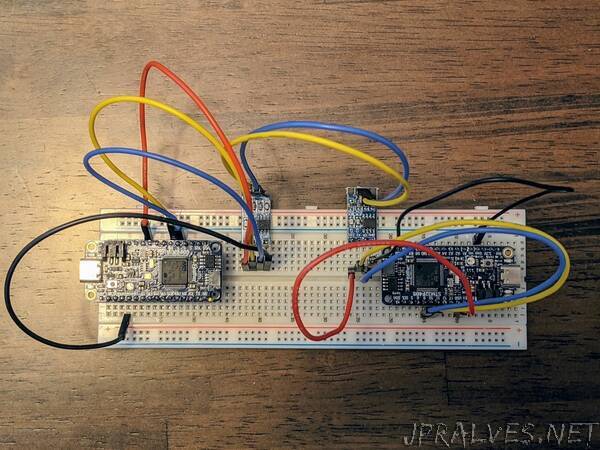
“A Controller Area Network (CAN bus) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other’s applications without a host computer.
In this guide you’ll learn how to use CircuitPython’s canio module to send and receive data between two supported boards, such as the Feather M4 CAN.”