Other
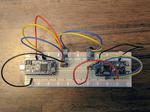
“A Controller Area Network (CAN bus) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other’s applications without a host computer. In this guide you’ll learn how to use CircuitPython’s …

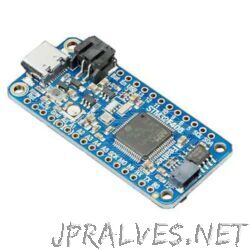
ST takes flight in this new Feather board. This STM32F405 Feather runs CircuitPython at a blistering 168MHz – our fastest CircuitPython board ever! We put a STEMMA QT / Qwiic port on the end, so you can really easily plug and play I2C sensors.
“A Controller Area Network (CAN bus) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other’s applications without a host computer. In this guide you’ll learn how to use CircuitPython’s …