
“Variable control allows external conditions, like temperature, to be monitored so the controller can activate devices to heat or cool the system as needed. Simulate a temp controller with low-cost components!
Electrical loads like DC and AC motors and solenoid-based actuators are basic electromechanical components that can provide rotational or linear motion for industrial machines.
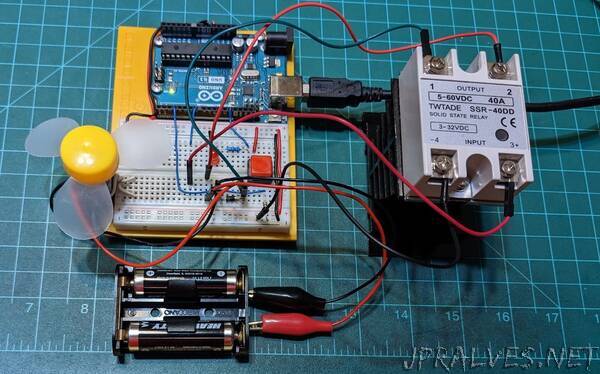
In this project article, you will learn how a solid-state relay (SSR) can assist in operating such electromechanical actuators by building and programming a temperature controller simulator using an Arduino and OpenPLC.
Additionally, we will explore the operation of the Greater-Than-Or-Equal-To comparison function block in the OpenPLC software.
Controlling Load Circuits With Relays
Industrial controllers like PLCs and remote I/O modules cannot drive electromechanical loads like motors or solenoids because of the high currents needed to operate them. The electromechanical relay is designed to operate where a low-current drive signal is transformed to switch high-current devices using such a switching component.
The controller has the necessary driver circuit to energize the electromechanical relay, allowing its contacts to operate appropriately. The relay contacts are rated for the electrical load operated with the required switching current flowing through them.
Although an electromechanical relay can switch the attached electrical load several thousands of times, eventually, the contacts begin to wear out. The SSR does not have physical electrical contacts to wear out. As the name implies, the SSR uses an internal electronic circuit to detect a control signal from an I/O module and turn on the solid-state switching component. Figure 1 illustrates a simple view of an SSR internal circuit.”