
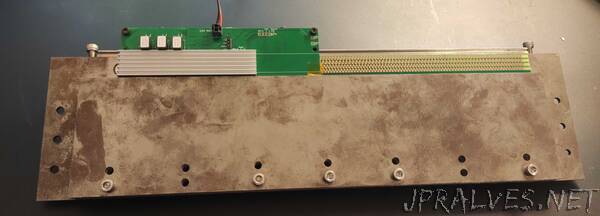
“A fully integrated PCB linear actuator, with the motor driver, encoder and motor all on a single PCB. All designs are open source:
Firmware and host software
PCB layout and schematics, mechanical components, simulation code
Motor Design and Validation
Design parameters of the motor were simulated with FEMM. There are not too many free parameters to optimize, but the goal is to find some off the shelf magnets which can be used, and to estimate the importance of things like air gap on motor performance.
The design ended up having the simplest possible winding layout (3 slots per pole), which maximized the amount of current carrying traces, while also having a high winding factor. 50mm * 10mm * 2mm magnets were used (which are a bit smaller in reality by ~0.5mm in each dimension), as they were easily available on EBay etc.”