
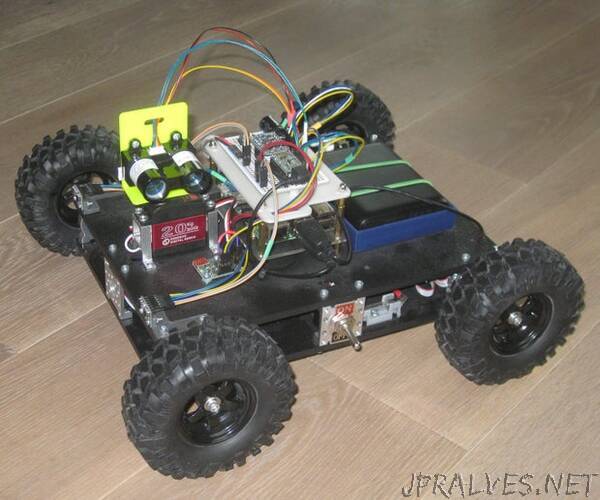
“The Autonomous Rover travels from one location in my house to another location in my house, with no help from a human. I designed it to experiment in robot autonomy.
To perform its task, the AR (short for Autonomous Rover) integrates three major capabilities:
Localization — determines its current location in its environment
Navigation — determines the optimal path from its current location to a target location
Locomotion — moves along the path from the current location to the target location
Three things…. Sounds pretty simple, but the devil is in the details. With my fully custom design, using hobby-grade mechanical and electronic components, and my limited experience in autonomous technologies, it proved difficult, but both fun and educational.
In truth, the AR is still a work in progress. However, the AR can currently localize with modest accuracy, plan a path perfectly, and move along a rather complex path with remarkable accuracy. Thus, I think that the collection of hardware and software, and lessons learned, might help others with similar goals. At the same time, the AR should make an interesting entry in the current Robots contest; please consider voting for it.
This Instructable first describes in detail the implementation of the capabilities. The capabilities are covered in three sets of steps that follow:
Locomotion: Describes how a 4-wheel drive platform equipped with an IMU is used to accomplish locomotion. See steps 1-4.
Localization: Describes how a LIDAR subsystem (a servo-mounted LIDAR sensor) is used to accomplish localization. See steps 5-12.
Navigation: Describes how software is used to accomplish navigation. See steps 13-19.
Locomotion and Localization include hardware components. For hardware, I discuss the components, criteria for selecting them, and relationships to other components. Worth noting is that the hardware components were chosen as long as three years ago. In some cases, the components I chose may no longer be the best choice, or in fact, may no longer be available. A key hardware component is a Raspberry Pi that provides the brains for the AR.
All three capabilities include software components. I chose Java as the programming language for the Raspberry Pi due to experience and performance advantages over Python. The choice also allowed me to develop code remotely using world class tools; see my Instructable on the subject. For software, I discuss overall architecture, algorithms and approaches, both empirical and heuristic, and on occasion mention alternatives considered or even implemented. I’ll provide pseudocode to aid understanding. Since the AR is still a work in progress, at this time, I don’t plan to make the 1000s of lines of code available, but might consider doing so in the future.
A final set of steps, 20-23, describe the integration of the three capabilities, weaving them together to produce the Autonomous Rover. The final steps include a video of the AR in action, and an analysis of an actual path traversal.”