
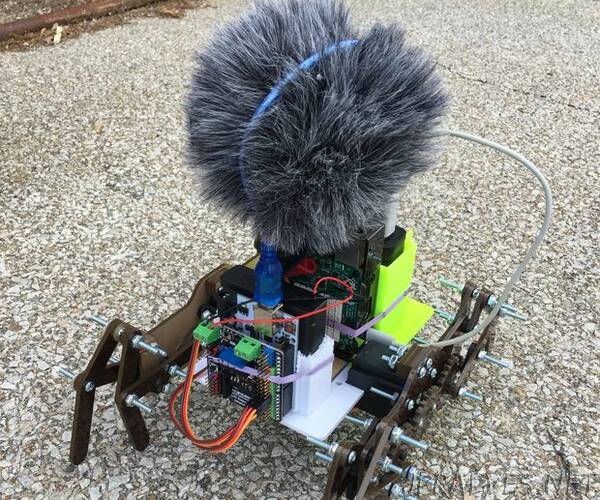
“PiCrawler is a robot designed for moving in all directions on the ground and supporting every component of itself. Here are the major pieces of tech used in this project:
Snips: an offline speech-recognition package
Raspberry Pi / Python: for a Snips API handler and communicate with the Arduino
Arduino: managing servos and receive commands from the Pi
Laser cutting (acrylic) / 3D Printing (PLA): for mechanical parts of the robot
InkSpace: for laser cutting design
TinkerCAD: for 3D printing parts design and modification
AUTOCAD Fusion: for testing the moving mechanism
Electronic hand tools: for drill, polishing, and modifications of laser cut and 3D printed parts
Reference:
The body design is based on this project
The moving mechanism is called Klann’s Linkage, which is a patented design and is used by the reference project”