
In today’s circuit we will build an infrared detector. Additionally we will build a circuit to detect the type of frequency and to which manufacturer the codes belong. The latter uses an Arduino and a library to obtain this information.
Infrared light having a wavelength that ranges between 870 nm and 930-950 nm. Some protocols have been developed by companies that market consumer electronics such as Philips with RC-5 and RC-6.
Typically these protocols use a coded bitstream (stream) through the Manchester code or another modulating a 36 kHz or 38 kHz carrier.
Unfortunately there is no standard and libraries have to implement the protocols of each of the manufacturers.
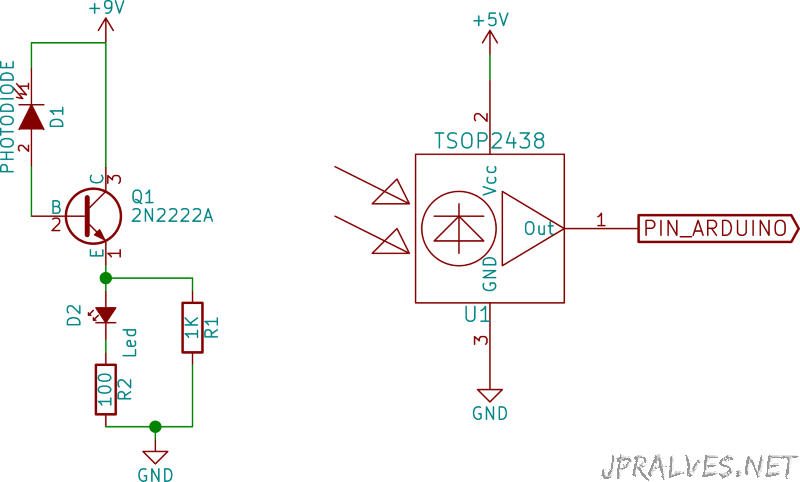
Schematic
Bill of materials (BOM)
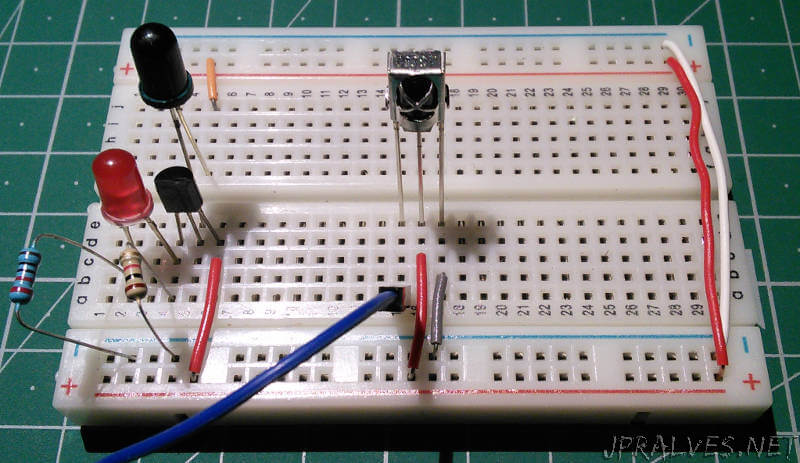
Circuit 1:
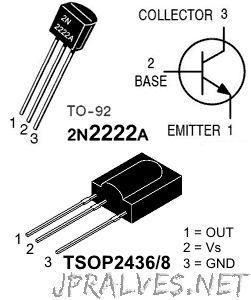
- 1x 2N2222 NPN Transistor (Q1)
- 1x 1K Ohms Resistor (R1)
- 1x 100 Ohms Resistor (R2)
- 1x Infrared Receiving Diode LED (D1)
- 1x 3mm LED (D2)
Circuit 2:
- 1x IR Receiver Module TSOP2438 (U1)
IC Pin-out
Code
I found several sources of interesting information to share.
The first sketch does not use any library and allows you to observe the encoding in RAW. This sketch was published in this site.
/* Raw IR decoder sketch!
This sketch/program uses the Arduno and a TSOP2438 to
decode IR received. This can be used to make a IR receiver
(by looking for a particular code)
or transmitter (by pulsing an IR LED at ~38KHz for the
durations detected
Code is public domain
*/
// We need to use the 'raw' pin reading methods
// because timing is very important here and the digitalRead()
// procedure is slower!
//uint8_t IRpin = 2;
// Digital pin #2 is the Pin D19 on the Mega2560(PD2)
// see http://arduino.cc/en/Hacking/PinMapping168 for the
// UNO pin mapping with ATMega168/328
#define IRpin_PIN PIND
#define IRpin 2
// the maximum pulse we'll listen for - 65 milliseconds is a long time
#define MAXPULSE 65000
// what our timing resolution should be, larger is better
// as its more 'precise' - but too large and you wont get
// accurate timing
#define RESOLUTION 20
// we will store up to 100 pulse pairs (THIS IS A LOT)
uint16_t pulses[100][2]; // pair is high and low pulse
uint8_t currentpulse = 0; // index for pulses we're storing
void setup(void) {
Serial.begin(9600);
Serial.println("Ready to decode IR!");
}
void loop(void) {
uint16_t highpulse, lowpulse; // temporary storage timing
highpulse = lowpulse = 0; // start out with no pulse length
// while (digitalRead(IRpin)) { // this is too slow!
while (IRpin_PIN & _BV(IRpin)) {
// pin is still HIGH
// count off another few microseconds
highpulse++;
delayMicroseconds(RESOLUTION);
// If the pulse is too long, we 'timed out' - either nothing
// was received or the code is finished, so print what
// we've grabbed so far, and then reset
if ((highpulse >= MAXPULSE) && (currentpulse != 0)) {
printpulses();
currentpulse=0;
return;
}
}
// we didn't time out so lets stash the reading
pulses[currentpulse][0] = highpulse;
// same as above
while (! (IRpin_PIN & _BV(IRpin))) {
// pin is still LOW
lowpulse++;
delayMicroseconds(RESOLUTION);
if ((lowpulse >= MAXPULSE) && (currentpulse != 0)) {
printpulses();
currentpulse=0;
return;
}
}
pulses[currentpulse][1] = lowpulse;
// we read one high-low pulse successfully, continue!
currentpulse++;
}
void printpulses(void) {
Serial.println("\n\r\n\rReceived: \n\rOFF \tON");
for (uint8_t i = 0; i < currentpulse; i++) {
Serial.print(pulses[i][0] * RESOLUTION, DEC);
Serial.print(" usec, ");
Serial.print(pulses[i][1] * RESOLUTION, DEC);
Serial.println(" usec");
}
}
// Sketch uses 2,354 bytes (7%) of program storage space. Maximum is 32,256 bytes.
// Global variables use 659 bytes (32%) of dynamic memory, leaving 1,389 bytes for local variables. Maximum is 2,048 bytes.
The second code for the Arduino was developed by Ken Shirriff and the sketch presented is one of the examples that comes in his library - IRremote.
This library can be downloaded from the following link. Can also be downloaded from here.
/*
* IRremote: IRrecvDump - dump details of IR codes with IRrecv
* An IR detector/demodulator must be connected to the input RECV_PIN.
* Version 0.1 July, 2009
* Copyright 2009 Ken Shirriff
* http://arcfn.com
* JVC and Panasonic protocol added by Kristian Lauszus (Thanks to zenwheel and other people at the original blog post)
* LG added by Darryl Smith (based on the JVC protocol)
*/
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
}
// Dumps out the decode_results structure.
// Call this after IRrecv::decode()
// void * to work around compiler issue
//void dump(void *v) {
// decode_results *results = (decode_results *)v
void dump(decode_results *results) {
int count = results->rawlen;
if (results->decode_type == UNKNOWN) {
Serial.print("Unknown encoding: ");
}
else if (results->decode_type == NEC) {
Serial.print("Decoded NEC: ");
}
else if (results->decode_type == SONY) {
Serial.print("Decoded SONY: ");
}
else if (results->decode_type == RC5) {
Serial.print("Decoded RC5: ");
}
else if (results->decode_type == RC6) {
Serial.print("Decoded RC6: ");
}
else if (results->decode_type == PANASONIC) {
Serial.print("Decoded PANASONIC - Address: ");
Serial.print(results->panasonicAddress,HEX);
Serial.print(" Value: ");
}
else if (results->decode_type == LG) {
Serial.print("Decoded LG: ");
}
else if (results->decode_type == JVC) {
Serial.print("Decoded JVC: ");
}
Serial.print(results->value, HEX);
Serial.print(" (");
Serial.print(results->bits, DEC);
Serial.println(" bits)");
Serial.print("Raw (");
Serial.print(count, DEC);
Serial.print("): ");
for (int i = 0; i < count; i++) {
if ((i % 2) == 1) {
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else {
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("");
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
dump(&results);
irrecv.resume(); // Receive the next value
}
}
// Sketch uses 10,618 bytes (32%) of program storage space. Maximum is 32,256 bytes.
// Global variables use 628 bytes (30%) of dynamic memory, leaving 1,420 bytes for local variables. Maximum is 2,048 bytes.