
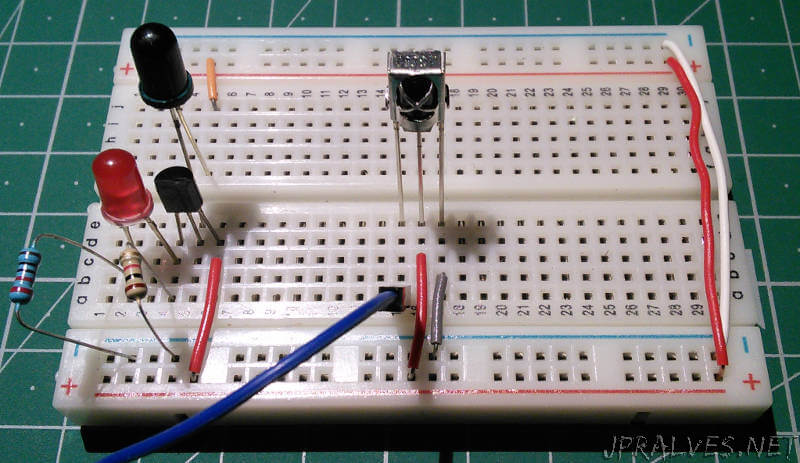
No circuito de hoje iremos construir o detector de infravermelhos. Adicionalmente iremos construir um circuito para detetar o tipo de frequência e a que fabricante pertencem os códigos. Este ultimo recorre a utilização de um Arduino e de uma biblioteca para obter esta informação.
A luz infravermelho que tem um comprimento de onda que se situa entre os 870 nm e os 930-950 nm.
Foram desenvolvidos alguns protocolos por empresas que comercializam de electrónica de consumo como a Philips com o RC-5 e o RC-6.
Tipicamente estes protocolos usam uma trama (stream) de bits codificada através do código Manchester ou outro modulando uma portadora de 36 kHz ou 38 kHz.
Infelizmente não existe um standard e as bibliotecas têm que implementar os protocolos de cada um dos fabricantes.
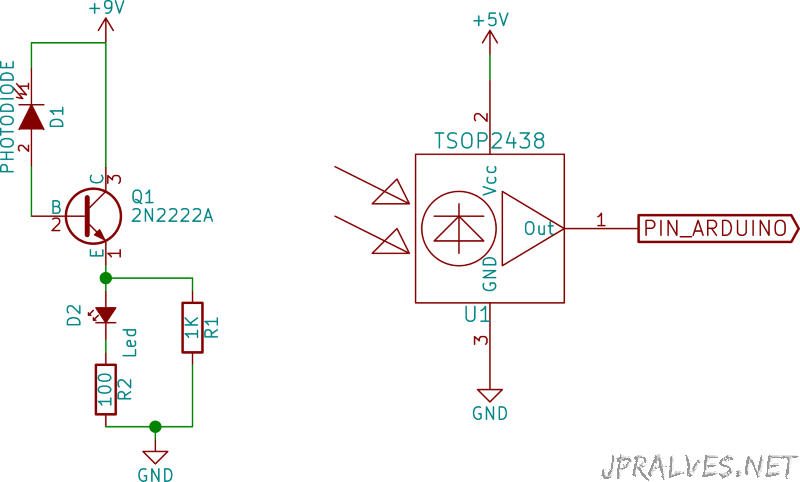
Esquemático
Componentes (BOM)
Circuito 1:
- 1x NPN Transístor 2N2222 (Q1)
- 1x Resistência de 1K Ohms (R1)
- 1x Resistência de 100 Ohms (R2)
- 1x Infrared Receiving Diode LED (D1)
- 1x LED 3mm (D2)
Circuito 2:
- 1x IR Receiver Module TSOP2438 (U1)
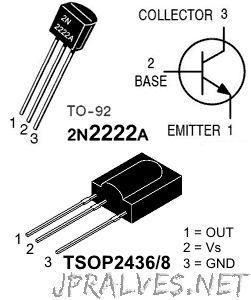
Pin-out dos IC
Código
Encontrei várias fontes de informação interessantes de partilhar.
O primeiro sketch não usa qualquer biblioteca e permite observar a codificação em RAW. Este sketch foi publicado neste site.
/* Raw IR decoder sketch!
This sketch/program uses the Arduno and a TSOP2438 to
decode IR received. This can be used to make a IR receiver
(by looking for a particular code)
or transmitter (by pulsing an IR LED at ~38KHz for the
durations detected
Code is public domain
*/
// We need to use the 'raw' pin reading methods
// because timing is very important here and the digitalRead()
// procedure is slower!
//uint8_t IRpin = 2;
// Digital pin #2 is the Pin D19 on the Mega2560(PD2)
// see http://arduino.cc/en/Hacking/PinMapping168 for the
// UNO pin mapping with ATMega168/328
#define IRpin_PIN PIND
#define IRpin 2
// the maximum pulse we'll listen for - 65 milliseconds is a long time
#define MAXPULSE 65000
// what our timing resolution should be, larger is better
// as its more 'precise' - but too large and you wont get
// accurate timing
#define RESOLUTION 20
// we will store up to 100 pulse pairs (THIS IS A LOT)
uint16_t pulses[100][2]; // pair is high and low pulse
uint8_t currentpulse = 0; // index for pulses we're storing
void setup(void) {
Serial.begin(9600);
Serial.println("Ready to decode IR!");
}
void loop(void) {
uint16_t highpulse, lowpulse; // temporary storage timing
highpulse = lowpulse = 0; // start out with no pulse length
// while (digitalRead(IRpin)) { // this is too slow!
while (IRpin_PIN & _BV(IRpin)) {
// pin is still HIGH
// count off another few microseconds
highpulse++;
delayMicroseconds(RESOLUTION);
// If the pulse is too long, we 'timed out' - either nothing
// was received or the code is finished, so print what
// we've grabbed so far, and then reset
if ((highpulse >= MAXPULSE) && (currentpulse != 0)) {
printpulses();
currentpulse=0;
return;
}
}
// we didn't time out so lets stash the reading
pulses[currentpulse][0] = highpulse;
// same as above
while (! (IRpin_PIN & _BV(IRpin))) {
// pin is still LOW
lowpulse++;
delayMicroseconds(RESOLUTION);
if ((lowpulse >= MAXPULSE) && (currentpulse != 0)) {
printpulses();
currentpulse=0;
return;
}
}
pulses[currentpulse][1] = lowpulse;
// we read one high-low pulse successfully, continue!
currentpulse++;
}
void printpulses(void) {
Serial.println("\n\r\n\rReceived: \n\rOFF \tON");
for (uint8_t i = 0; i < currentpulse; i++) {
Serial.print(pulses[i][0] * RESOLUTION, DEC);
Serial.print(" usec, ");
Serial.print(pulses[i][1] * RESOLUTION, DEC);
Serial.println(" usec");
}
}
// Sketch uses 2,354 bytes (7%) of program storage space. Maximum is 32,256 bytes.
// Global variables use 659 bytes (32%) of dynamic memory, leaving 1,389 bytes for local variables. Maximum is 2,048 bytes.
O segundo código para o Arduino foi desenvolvido pelo Ken Shirriff e o sketch apresentado é um dos exemplos que vem na biblioteca dele - IRremote.
Esta biblioteca pode ser descarregada do seguinte link. Pode igualmente ser descarregado daqui.
/*
* IRremote: IRrecvDump - dump details of IR codes with IRrecv
* An IR detector/demodulator must be connected to the input RECV_PIN.
* Version 0.1 July, 2009
* Copyright 2009 Ken Shirriff
* http://arcfn.com
* JVC and Panasonic protocol added by Kristian Lauszus (Thanks to zenwheel and other people at the original blog post)
* LG added by Darryl Smith (based on the JVC protocol)
*/
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
}
// Dumps out the decode_results structure.
// Call this after IRrecv::decode()
// void * to work around compiler issue
//void dump(void *v) {
// decode_results *results = (decode_results *)v
void dump(decode_results *results) {
int count = results->rawlen;
if (results->decode_type == UNKNOWN) {
Serial.print("Unknown encoding: ");
}
else if (results->decode_type == NEC) {
Serial.print("Decoded NEC: ");
}
else if (results->decode_type == SONY) {
Serial.print("Decoded SONY: ");
}
else if (results->decode_type == RC5) {
Serial.print("Decoded RC5: ");
}
else if (results->decode_type == RC6) {
Serial.print("Decoded RC6: ");
}
else if (results->decode_type == PANASONIC) {
Serial.print("Decoded PANASONIC - Address: ");
Serial.print(results->panasonicAddress,HEX);
Serial.print(" Value: ");
}
else if (results->decode_type == LG) {
Serial.print("Decoded LG: ");
}
else if (results->decode_type == JVC) {
Serial.print("Decoded JVC: ");
}
Serial.print(results->value, HEX);
Serial.print(" (");
Serial.print(results->bits, DEC);
Serial.println(" bits)");
Serial.print("Raw (");
Serial.print(count, DEC);
Serial.print("): ");
for (int i = 0; i < count; i++) {
if ((i % 2) == 1) {
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else {
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("");
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
dump(&results);
irrecv.resume(); // Receive the next value
}
}
// Sketch uses 10,618 bytes (32%) of program storage space. Maximum is 32,256 bytes.
// Global variables use 628 bytes (30%) of dynamic memory, leaving 1,420 bytes for local variables. Maximum is 2,048 bytes.