
“This is an autonomous mobile disinfecting robot that disinfects a confined space by deploying aerosol disinfectant.
Introduction and Acknowledgements
It is a vital need at this moment to have frequent and consistently effective sterilization of bacteria and viruses in a variety of facilities and homes. It is also evident that in the scenarios where sterilization of walls and floors is concerned, there are simply not enough manhours available to consistently clean walls and floors by hand at repeated time intervals. This is especially true in hospitals and hospices, where the available staffing is a precious commodity. The use of a robot to complete these tasks is a workable solution to this problem and would be welcome in thousands of workplaces and homes that cannot afford more complete solutions.
This is a capstone project completed by a team including Harris Godwin, Garrett Mccarty, and myself for the Electrical Engineering Senior Project course under the instruction of Dr. Cyril Okhio at Kennesaw State University. The team would like to acknowledge a debt of gratitude to Dr. Cyril Okhio for his constant support of the team’s efforts and his indispensable guidance, Dr. Hai Ho for his wealth of knowledge and experience he has offered, and Texas Instruments for providing their Robotic Systems Learning Kit for use on this project. Additional thanks also goes to the students of the KSU 3D Center for their assistance.
Objectives and Design Criteria
During the Fall 2020 semester, the team set out to design, build, and test an autonomous disinfecting robot. The fundamental design goals were to build an autonomous mobile robot based on the Texas Instruments Robotics Systems Learning Kit (RSLK) Max Edition that is capable of the following. The robot must safely disinfect a confined space for a finite period of time, and disinfection must occur effectively on nearly every surface nearby. The team eventually settled on aerosol disinfection as the mechanism to meet this challenge.
In addition to the TI RSLK and its associated components, the design of an aerosol can actuation system is critical to the operation of the robot. To secure the cans and actuator system, a structure was called for that would have a small footprint and be robust enough to effectively support these components. And to test the system for its functionality and effectiveness, a test course modelled after the Q-103 classroom in the Engineering Technology Center at the Marietta campus of Kennesaw State University was constructed.
Components
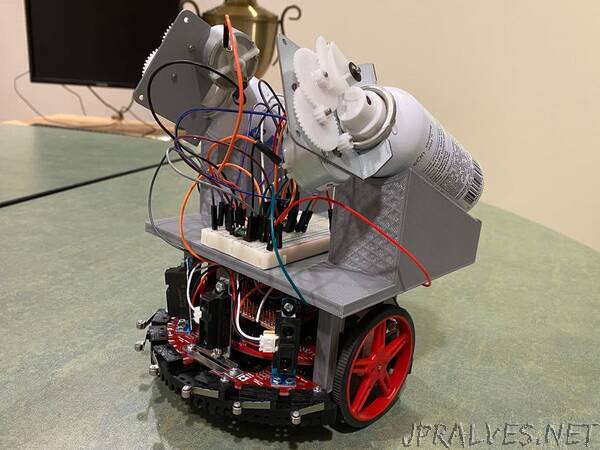
At its most basic level, the robot needed to include the TI RSLK, aerosol disinfectant cans, an aerosol can actuator system, a support structure for the cans and actuator system, sensors, and a power supply.
The TI RSLK Max Edition includes the Romi chassis and wheels from Pololu, a power distribution board, which includes two TI DRV8838 motor drivers (used to drive the left and right motors), the MSP432 LaunchPad board, two gearmotor and encoder assemblies, left and right bumper switch assemblies, and a 400-point breadboard, as shown below. The power distribution board in the fully assembled robot makes direct connections from analog and digital signals to the appropriate GPIO pins.”