
“Introduction
I worked for almost two decades in the software industry. In the early 2000s, I was developing applications on Windows, Linux, and various flavours of Unix. On the Windows side, we had Microsoft Visual Studio, MFC, NMake, and CL. On the Linux/Unix side, we had GCC, POSIX and various types of windowing toolkits (X-Window + Motif, anyone?). Cross platform development was a challenge, but even before the advent of fancy tools like Qt and wxWindows, we were able to structure the code so that large parts of it was compatible across the different operating systems.
Compared to that, cross-platform development in the embedded world today is far more difficult. First of all, there are many chip architectures – AVR, ARM, Xtensa, RISC-V, etc., and these chips vary hugely in their capabilities and supported peripherals. Then there are different sorts of toolchains, libraries, and development environments. Not all them can run an OS (or an RTOS) and in many cases, people don’t prefer to. Overall, good luck trying to port your code from once device to another! Although efforts like mbed try to address the cross-platform issue, they are restricted to certain chip families.
Why not just use embedded Linux then? You certainly can in many cases, as the huge success of Raspberry Pi shows. But when it comes to resource constrained low power systems, Linux is just too heavy. Enter Zephyr – an RTOS (Real Time Operating System) that is very much influenced by Linux, but designed specifically with the above constraints in mind.
Objective
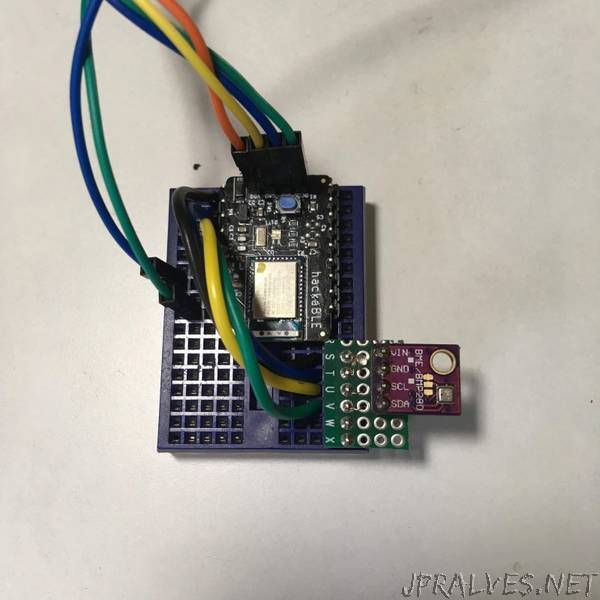
In this project, we will build a BLE (Bluetooth Low Energy) device that broadcasts data from a BME280 temperature/humidity sensor. For this, we will use the Zephyr RTOS on the Electronut Labs hackaBLE board based on the Nordic nRF52832 SoC. For programming hackaBLE, we will use the Electronut Labs Bumpy SWD debugger based on the blackmagicprobe project.
Getting Started
The first thing to do of course, is to install Zephyr. For this task and for all tasks ahead, the official documentation page is your best reference. You can install Zephyr on Linux, Mac, or Windows. But I did it on Linux, and hence this article will reflect that experience. As you go through the official installation procedure, I recommend that you install the Zephyr SDK as well, since it has the required toolchain. Makes it easy to get started.
Now, before we proceed to build our “hello world” application with Zephyr, let’s look at a few concepts that are central to working with this RTOS.”