
“This provides libraries and examples code of controlling position and speed of DC motor using PID controller and auto-tuning.
Introduction
Have you ever heard about PID controller?
It is a controller that is widely used in industrial to control various process variables such as temperature, pressure, force, feed rate, flow rate, chemical composition (component concentrations), weight, position, speed, and practically every other variable for which a measurement exists.
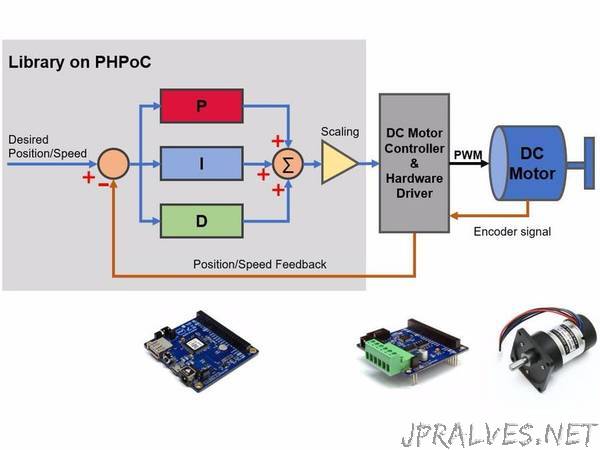
In this article, I focus on using PID to control position and speed of Brushed DC motor.
What decides performance of a PID controller?
Performance of PID is decided by Kp, Ki and Kd gain (coefficients for the proportional, integral, and derivative terms). Each system has its own optimal PID gain. Finding the best PID gains is difficult task. Therefore, we usually use an acceptable gain. This link give an illustration of impact of Kp, Ki and Kd on system
The process of finding value of these parameters is called “tuning”. PID controller can manually tuning and auto-tuning…
Manually tuning: This method requires experienced personnel
Auto-tuning: the tuning is done by a software.
I implemented Auto-tuning library for position and speed of DC motor (see the source code) using Relay On/Off method. This code is written for PHPoC platform.
PID gain from auto-tuning is not the best gain. You can manually fine-tune based on PID gain from auto-tuning.”