
Other

“Via Nano 33 BLE, collate local weather data, build and train a TensorFlow neural network model, and run the model to predict air quality. Since the risk of breathing polluted air with poor quality has been increased precipitously in recent …

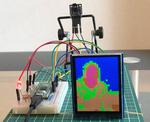
“Collect irrigation level data by thermal imaging, build and train a neural network model, and run the model directly on Wio Terminal. Since global temperatures are expected to rise over the next few decades due to climate change and thus …

“This bracelet enables you to do basic calculations on the spot by simply gesturing what you want in the air. Story I work in a research lab and taking my gloves off just to do some basic arithmetic on my …

“Acute Lymphoblastic Leukemia Detection on the NVIDIA Jetson Nano. The Acute Lymphoblastic Leukemia Jetson Nano Classifier is a Convolutional Neural Network (CNN) developed using Intel® oneAPI AI Analytics Toolkit and Intel® Optimization for Tensorflow* to accelerate the training process, and …

“Using a Tensorflow Lite Micro model this edge device keeps an ear out and vibrates if you are snoring. Overview Snoring is estimated to affect 57% of men and 40% of women in the United States. It even occurs in …
“A system which detects intruders in dark with a low resolution thermal camera connected to a Raspberry Pi Pico using a TensorFlow Lite model Suppose you are alone at home or out for shopping or on vacations and someone breaks …

“Combine TensorFlow.js with Node-RED to create AI-enabled Node-RED applications in various environments Lowering the barrier to entry for artificial intelligence (AI) is a goal that is continually strived for. Making AI more widely accessible will not …

“Easy object detection framework that can be used to create a La Croix Flavor Detector or any other object detection project in Python! Teachable Machine is an easy, but powerful tool to create machine learning models. It allows for easy …

“The TinyML Wake Word demo on the Raspberry Pi Pico. A less than $10 wake word! TinyML Wake-Word Detection on Raspberry Pi Pico This application implements the wake word example from Tensorflow Lite for Microcontrollers on the Raspberry Pi Pico …

“Learn to build your very own smart weather station powered by machine learning, from data acquisition to training to deployment! In today’s tutorial, learn to create your own Wio Terminal Smart Weather Station with TinyML powered prediction capabilities! This …