
“This project would not be possible with the amazing project that Dr. Asier Marzo created.
https://www.instructables.com/Acoustic-Levitator/
Like all good projects, this one started out simple and grew as time went on. After reading Dr. Marzo intractable and realizing that there were a couple of old HC-SRO4’s laying around left over from a robotics project, we decided to build one.
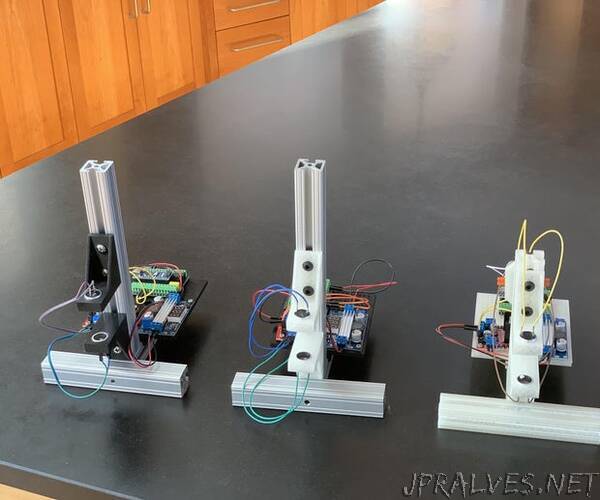
Several things were obvious looking at the pictures of the dual transducer design (MiniLev) and reading articles. First, if the transducers are held parallel to each other, you have a better chance of creating a consistent standing wave. Second, the distance between the transducer needs to be adjustable, while holding the transducers parallel. There was a scrap piece of 8020 on the desk being used as a paperweight. A half hour with Fusion 356, a couple of hours printing the parts, a little back-of-the-envelope math, and we were in business. The original test was done with the extrusion held in a vice on the desk. It met the first and second design criteria and produced really good results.
You hit that time when you should tear a project down and move on to the next; that didn’t happen. It was too much fun to mess with, and the envelope was replaced by a notebook. However we did need the vice back, so grabbed a couple more scrap pieces, cut them down and made a base. To clean up the electronics and make the design the portable (think middle school science fair), we created a platform that clipped to the extrusions in the base. This gave us design constraints number three and four. Constraint number five came when we were asked build one for the child of a friend of ours. It needed to be simple to assemble and disassemble.”