
“The scientists at the Max Planck Institute for Intelligent Systems in Stuttgart who invented Jellyfishbot win the Best Paper Award at a prestigious robotics conference and have their work published in Nature Communications. Their research holds great potential when investigating the impact of environmental changes in the ocean’s ecosystem. Another aim is for Jellyfishbot to be applied in the treatment of cancer.
Stuttgart - Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) have developed a robot that looks and moves like a jellyfish, one of the world’s most common marine animals. The team named their invention “Jellyfishbot”. The untethered robot features an umbrella-shaped bell and trailing tentacles, just like its natural model. Today, the research was published in Nature Communications with the title “Multi-functional soft-bodied jellyfish-like swimming”.Ziyu Ren, a Ph.D. student in the Physical Intelligence Department at the MPI-IS, and Dr. Wenqi Hu, a research scientist working in the same department, are both lead authors of the publication. Xiaoguang Dong, a Ph.D. student in the same department, also participated in the research, as did Dr. Metin Sitti, Director at the MPI-IS and head of the Physical Intelligence Department. He proposed and led this research as the last author.
Additionally, with the knowledge learned from this bio-inspired robot platform, the team created a new Jellyfishbot design for medical applications in a follow-up study. Last week, this research work was published at one of the world’s most prestigious robotics conferences, in Robotics: Science and Systems, where it won the Best Paper Award. Ziyu Ren and Tianlu Wang, who is also a Ph.D. student in the Physical Intelligence Department at MPI-IS, share the first authorship here.
“The idea behind this project was twofold,” Sitti explains and refers to the typical research methodologies applied in his Physical Intelligence Department. “We learn and take inspiration from a range of biological systems to create tiny bio-inspired robots. We use them to study and better understand biological systems. But more importantly, such newly created robots could perhaps one day solve the critical scientific and technological challenges we face in healthcare and environment, helping to improve the welfare of our society.”
The researchers took inspiration form baby jellyfish (scyphomedusa ephyra), hence the tiny size of the soft robot: It has a diameter of only about five millimeters. Embedded into the elastomer lappets are magnetic particles, with which the scientists can control the robot when exposing it to an external oscillating magnetic field. For instance, they can move its soft body in such a way that it floats upwards in a snake-like movement (figure 1) – just like the real animal.
Jellyfish are one of the most common species in the ocean ecosystem. They are a key component in the food chain. Their population greatly depends on their survival during their early life-cycle. Therefore, the scientists took to observing the ephyra jellyfish – the juvenile of this species – and studied its swimming, predation, and bio-mixing behavior.
They found that the jellyfish applies a paddling motion to propel itself forward. When swimming, it actively creates a fluidic flow around its soft body. It does so to catch prey by pulling and trapping small organisms under its umbrella while moving about.
“Obviously, it is much easier to record and measure the swimming of our robot instead of the real thing”, Ziyu Ren answers when asked why he and his team took on the task of building a Jellyfishbot. “The swimming motion data is much cleaner and we can ask questions such as what happens to the fluid around it if the jellyfish swims differently.”
Metin Sitti sees this research to have a great impact: “We can use this tiny robot to investigate important environmental questions. The jellyfish plays an important role in the ocean’s ecosystem by stirring it up, by creating unique fluidic flows – as do winds and tides. However, changes in the environment may cause changes in the animal’s swimming behavior, and therefore in their ability to mix the sea. Understanding the relation between the robot’s motion and the incurred fluid flow can help us evaluate possible climate change influences on the water’s mixing.”
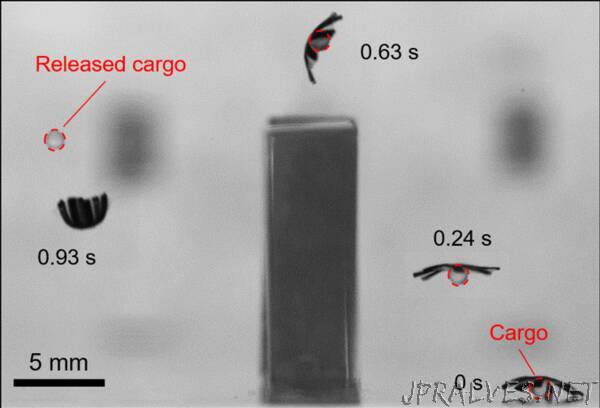
In addition to answering environmental questions, another intriguing feature of the Jellyfishbot is its ability to achieve multiple functions. “When we mimic the swimming of the larval jellyfish, we can trap and manipulate objects with this millimeter-sized robot using the same mechanism a jellyfish applies when on the prowl,” Wenqi Hu says. The scientists actuate the magnetic composite elastomer lappets by an external oscillating magnetic field to achieve different movements, such as burrowing, mixing, selective trapping as well as transporting and spreading chemicals.
The functionalities of the untethered miniature swimming robots could also have many potential uses in medical applications. “A possible application scenario is to control the robot to swim inside the bladder under the guidance of ultrasound imaging, and to patch to a target, such as cancerous tissue, to release the cancer drug for a long time in controlled doses”, Xiaoguang envisions. This could have a huge impact for patients. It could reduce the discomforts brought by conventional treatment procedures and increase the treatment efficiency.”