
“The idea is to create a robotic arm which can perform pick and place objects using object recognition.
Story
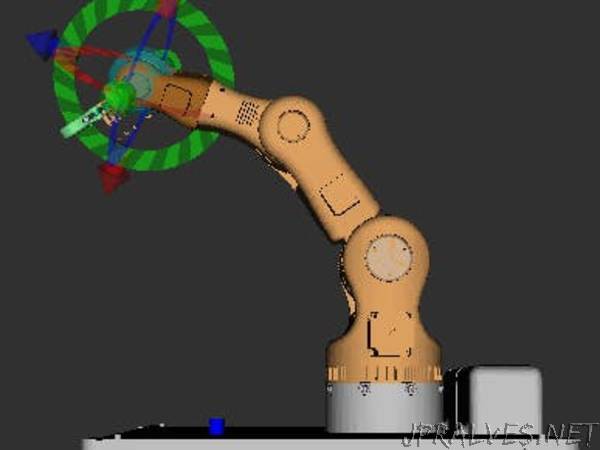
Robot Arm (5 DOF) Using Arduino Mega2560 and ROS
Note: Knowledge of ROS basics, TF and URDF is must.
The idea is to create a robot arm that can perform pick and place objects using object recognition. I used Arduino Mega 2560 along with RAMP 1.4 for connecting motors, performing task. I used an external library called AccelStepper for motion control of the stepper motors. Arduino is connected with PC serially which has ROS for visualization, planning trajectory of robotic arm along with tensorflow and opencv for object detection. All joints are actuated with stepper motors except the parallel-jaw gripper which is actuated with a servo.
Bill of Materials (BOM)
Arduino Mega $40
RAMP 1.4 $7
TB6560 stepper motor driver (x5) $42
NEMA23 stepper motor (x2) $ 24.18
NEMA17 stepper motor $ 6.55
NEMA17 long stepper motor $ 11.85
NEMA17 5:1 geared motor $26.89
NEMA14 stepper motor $7.62
Servo motor $ 32.48
8mm x 22mm x 7mm bearing $68
5mm x 16mm x 5mm bearing $ 53
4mm x 13mm x 5mm bearing $ 59
3mm x 10mm x 4mm bearing $ 21
M8 x 40mm threaded rod $9
8mm x 140mm smooth rod $4
8mm x 115mm smooth rod
8mm x 80mm smooth rod
65cm T5 belt $27
50cm T5 belt
35cm T5 belt
T5 pulley 8mm bore $25
T5 pulley 1/4” bore $11
T5 pulley 5mm bore $11
5mm to 8mm shaft coupler $5
M3 heat-set inserts $5
M4 heat-set inserts $3.14
M5 heat-set inserts $3.66
M5 x 14mm screw $ 2
M8 x 65mm screw $0.37
M3 x 25mm screw $ 0.61
M4 x 20mm screw $0.70
M4 x 40mm screw $2
M3 x 40mm screw $0.67
M3 x 10mm screw $1.40
M4 x 10mm screw $0.33
M3 x 16mm screw $0.84
M3 x 30mm screw $0.18
M4 x 55mm screw $0.70
M4 x 45mm screw $0.84
M3 thread-forming screw $ 1.41
M3 nut $0.08
M4 nut $0.32
M8 locknut $0.16
M3 washer $0.11
M4 washer $0.22
24V 240W power supply $43
Power supply interface PCB $20
Wires $10
Logitech c270 webcam $24
Total cost of project is $574. 3D printing parts not included.”
Link to article