
“In late 2015 I was doing my usual head-scratching about what gifts to get various family members for the holiday season. My wife mentioned making something electronic for my father-in-laws boat, and after a few hours of collecting thoughts came up with an idea:
A Raspberry Pi computer, which could be powered off the boats 12v batteries.
This computer would have sensors which made sense on a boat. Certainly GPS.
I’d have some software which collated the sensor data and displayed it nicely.
This could plug into the onboard TV using HDMI.
It would all be put into a suitable enclosure.
Excellent – a plan. I expected the hardware part to be easy, the enclosure part fairly straightforward, and the software part to be an absolute disaster. I started searching for an already-existing project to take care of the software side of things.
That’s when I came upon a project called OpenPlotter. It’s a fully-featured linux distribution for Raspberry Pi, specifically for use on a boat, and includes the relevant software for calibrating, collating and transforming data from various sensors into a form that can be used practically. I’ve got to be honest here – OpenPlotter is solid, does exactly what it advertises, and very simple for someone familiar with RPi/Linux to set up and use.
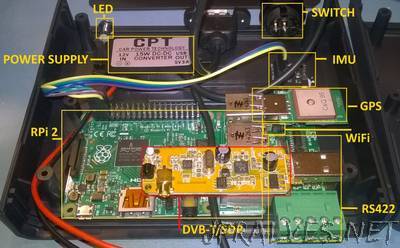
After firmly deciding on OpenPlotter for the software, and knowing I’d be using an old Raspberry Pi 2 I had collecting dust, I looked at what hardware OpenPlotter supported. The list is fairly long, and gave me ideas I had not thought of previously – for example using a USB DVB-T television dongle as an AIS receiver with Software Defined Radio (SDR), allowing real-time data of nearby ships to be displayed. MarineTraffic uses this AIS data, but of course on a boat you can’t rely on an internet connection to pull data from – it’s much better to get the data directly from the VHF signals.
In addition to AIS and GPS, I’d add an Inertial Measurement Unit (IMU – basically an accelerometer, gyroscope and magnetometer in one) in the form of an InvenSense MPU-9150, and also a USB to RS422 converter. RS422 is specified as part of the protocol standard for NMEA 0183, which in turn is the communication specification used in marine electronics. Supporting input and output of direct NMEA using RS422 would allow for some extendibility, for example depth sensors that are already present can feed data into OpenPlotter using this port.
After going and purchasing all of these sensors, I realised that actually using the TV inside the boat isn’t going to be useful, as it’s not visible from the helm. Thankfully, OpenPlotter allows for headless operation, and will automatically set up a WiFi hotspot so you can connect a phone/tablet to the Raspberry Pi and control it using VNC or other software.”