
Other

“In this tutorial, I will show you how to make your own obstacle avoiding robot! We will use the Arduino UNO board and an ultrasonic sensor. If the robot detects an object in front of it, with the help of …

“This project uses an Arduino robot running a ESP-8266 Node MCU that communicates (and drives around) with a mobile phone. The phone is running an app made in the video game engine Unity 3D that does 3 things: 1 …

“A project I have done in my spare time. It is a full-drive 4 wheel robot controlled through a web interface. If you have any comments or questions please feel free to contact me. This project itself uses 3D printed …

“Hello everyone This is my first instructable. A rolling robot (nicknamed Raidho - from the rune that is associated with motion) based on ESP32 Thing, TB6612 FNG and BLE. One part that may seem peculiar is that the photos are not …
“A rover that runs on wheels using Arduino controlled remotely through our voice command alone! (With the use of Bitvoicer). Story Hello Friends, By this project we have managed to control a rover or car using our voice command alone …
“I was always fascinated with balancing robots and wanted to build one myself. Some time ago I started collecting IMU, arduino boards, wheels, motors for other wheeled robots and one day decided to build a balancing robot instead. I’ve …

“For this project, we will be developing a 4-Wheeled Robot using ESP8266 which will be controlled over a Wi-Fi Network. The robot can be controlled from an ordinary internet browser, using a HTML designed interface or also from an android …

“In this tutorial I show you how to make a Wi-Fi controlled robotic tank controlled from a smartphone using Blynk App. In this project an ESP8266 Wemos D1 board was used, but other plate models can also be used (NodeMCU …

“This “talking, watching, listening” candy dispenser is triggered by the code word, “Alexa.” When “Alexa” is heard, the Adafruit sound board requests, “If you want candy, smile NOW!” The Google AIY vision kit watches for a smile. If there is …
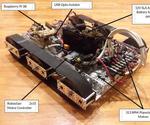
“The lofty goal (for me, anyway) was to make a mobile autonomous robot that could sense its surroundings, learn the layout of the home, respond to verbal instructions, and recognize/identify images. And more as time goes on. Also included …