
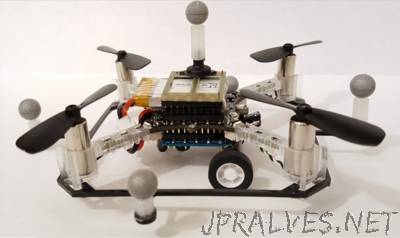
“Being able to both walk and take flight is typical in nature — many birds, insects, and other animals can do both. If we could program robots with similar versatility, it would open up many possibilities: Imagine machines that could fly into construction areas or disaster zones that aren’t near roads and then squeeze through tight spaces on the ground to transport objects or rescue people. The problem is that robots that are good at one mode of transportation are usually bad at another. Airborne drones are fast and agile, but generally have too limited of a battery life to travel for long distances. Ground vehicles, on the other hand, are more energy efficient, but slower and less mobile. Researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) are aiming to develop robots that can both maneuver around on land and take to the skies. In a new paper, the team presented a system of eight quadcopter drones that can fly and drive through a city-like setting with parking spots, no-fly zones, and landing pads.”