
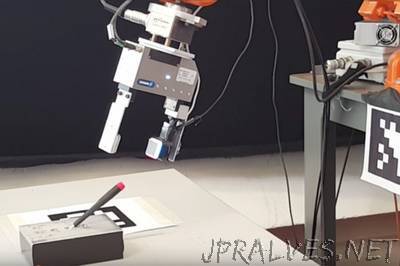
“Eight years ago, Ted Adelson’s research group at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) unveiled a new sensor technology, called GelSight, that uses physical contact with an object to provide a remarkably detailed 3-D map of its surface. Now, by mounting GelSight sensors on the grippers of robotic arms, two MIT teams have given robots greater sensitivity and dexterity. The researchers presented their work in two papers at the International Conference on Robotics and Automation last week. In one paper, Adelson’s group uses the data from the GelSight sensor to enable a robot to judge the hardness of surfaces it touches — a crucial ability if household robots are to handle everyday objects. In the other, Russ Tedrake’s Robot Locomotion Group at CSAIL uses GelSight sensors to enable a robot to manipulate smaller objects than was previously possible. The GelSight sensor is, in some ways, a low-tech solution to a difficult problem. It consists of a block of transparent rubber — the “gel” of its name — one face of which is coated with metallic paint. When the paint-coated face is pressed against an object, it conforms to the object’s shape. The metallic paint makes the object’s surface reflective, so its geometry becomes much easier for computer vision algorithms to infer. Mounted on the sensor opposite the paint-coated face of the rubber block are three colored lights and a single camera.”