
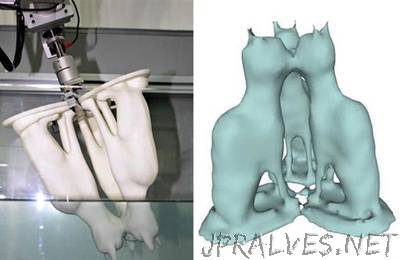
“An international group of researchers developed a technique that results in more accurate 3-D scanning for reconstructing complex objects than what currently exists. The innovative method combines robotics and water. “Using a robotic arm to immerse an object on an axis at various angles, and measuring the volume displacement of each dip, we combine each sequence and create a volumetric shape representation of an object,” says Prof. Andrei Scharf, of Ben-Gurion University of the Negev, Department of Computer Science. “The key feature of our method is that it employs fluid displacements as the shape sensor,” Prof. Scharf explains. “Unlike optical sensors, the liquid has no line-of-sight requirements. It penetrates cavities and hidden parts of the object, as well as transparent and glossy materials, thus bypassing all visibility and optical limitations of conventional scanning devices.” The researchers used Archimedes’ theory of fluid displacement — the volume of displaced fluid is equal to the volume of a submerged object — to turn the modeling of surface reconstruction into a volume measurement problem. This serves as the foundation for the team’s modern, innovative solution to challenges in current 3-D shape reconstruction. The group demonstrated the new technique on 3-D shapes with a range of complexity, including an elephant sculpture, a mother and child hugging, and a DNA double helix. The results show that the dip reconstructions are nearly as accurate as the original 3-D model. The new technique is related to computed tomography — an imaging method that uses optical systems for accurate scanning and pictures. However, tomography-based devices are bulky and expensive and can only be used in a safe, customized environment.”