
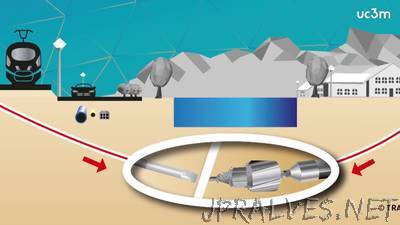
“Participating in the project, which is coordinated by the UC3M Robotics Lab, are researchers from Germany, Greece, Italy and the United Kingdom. Its goal is to develop an intelligent system for the autonomous excavation of small diameter, high gradient tunnels in urban environments. “The use of innovative localization, mapping and navigation techniques, along with sensors and georadars, will allow them to be adapted to different land surfaces and aid in the analysis of the work environment and decision making in attaining the goals,” stated project coordinator, Carlos Balaguer, full professor in the UC3M Department of Systems Engineering and Automation. BADGER (roBot for Autonomous unDerGround trenchless opERations, mapping and navigation) is a project that incorporates several innovations. The main one is this new application of robotics to an underground environment. Until now, robotics was a field focused especially on walking or rolling surface robots and flying or underwater robots. Autonomous navigation, meanwhile, is another of the project’s strong points, as all the sensors, georadars and computers will be integrated in the machine, which enables them to make a much more precise and controlled exploration of the land. Lastly, the use of ultrasound techniques to perforate the ground, accompanied by a 3D printer on the robot itself to reinforce the tunnel where the cables and tubes lie, also plays an essential role.”