
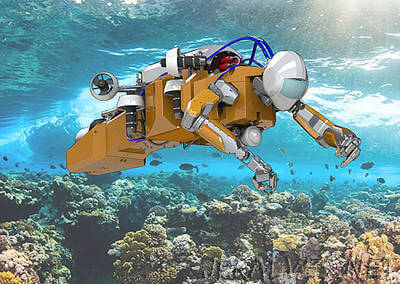
“Current underwater exploration and monitoring of oceanic resources is both expensive and challenging. It requires human divers who can only explore underwater environments during short periods of time and who can only safely go down to certain depths. Underwater vehicles have proven to be useful for exploring oceans at greater depths, but they lack human dexterity, which is necessary for performing fine manipulation tasks such as collecting samples and in situ experimentation. These underwater vehicles are also large and cumbersome, and their mechanical characteristics make them difficult to operate in closely confined fragile spaces or in turbulent fluid environments. To solve this issue, KAUST and Stanford University together with Meka Robotics have been collaborating for the past three years on an ambitious project. The goal of the project, called Red Sea Robotics Exploratorium, is to design and build a radical new underwater robotic platform to serve as a robotic avatar diver. The research project at KAUST is conducted between the University’s Computer, Electrical and Mathematical Sciences and Engineering (CMSE) division, the Red Sea Research Center in the Biological and Environmental Science and Engineering (BESE) division, and the Artificial Intelligence lab team at Stanford University. The KAUST team includes Professors Khlaed Salama, Xabier Irigoyen, and Christian R. Voolstra. Stanford’s team is led by Professors Oussama Khatib and Mark R Cutkosky and is under an AEA3 Collaborative Research Grant.”