
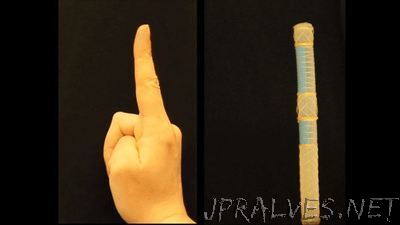
“Designing a soft robot to move organically to bend like a finger or twist like a wrist has always been a process of trial and error. Now, researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering have developed a method to automatically design soft actuators based on the desired movement. The research is published in The Proceedings of the National Academy of Sciences.”