Neste artigo iremos construir um circuito para controlar a posição de um servo. Os servos são tipicamente pequenos em tamanho e são tipicamente usados para operar robots, carros ou aviões controlados remotamente via-radio. São igualmente usados em aplicações industriais, robótica, manufatura, etc.
Um servo é construído no interior da unidade do motor e tem um eixo posicionável, que normalmente é equipado com uma engrenagem. O motor é controlado por um sinal eléctrico (PWM), que determina a quantidade de movimento do eixo.
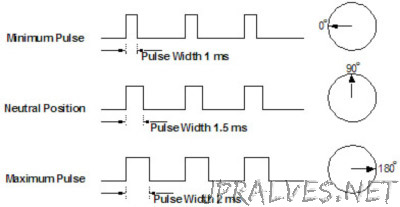
Os Servos são controlados através do envio de um impulso eléctrico de largura variável, ou a modulação de largura de impulso (PWM), através do fio de controlo. Há um mínimo de pulsação, um pulso máximo e uma taxa de repetição. Um servo-motor normalmente só pode girar 90° em qualquer dos sentidos para um total de 180° de movimento. A posição neutra do motor é definida como a posição em que o servo tem a mesma quantidade de rotação no potencial tanto no sentido dos ponteiros do relógio ou no contrário. O PWM enviado para o motor determina a posição do eixo, e com base na duração do impulso enviado através do fio de controlo do rotor vai rodar para a posição desejada. O servo-motor espera para ver um impulso a cada 20 mili-segundos (ms) e o comprimento do impulso determina o quanto o motor gira. Por exemplo, um impulso de 1.5ms sua vez fará com que o motor para a posição de 90°. Mais curta do que 1.5ms move-a para 0° C e por mais tempo do que 1.5ms irá transformar o servo de 180°, como esquematizada abaixo.
Quando é dada a ordem aos servos para se moverem, eles vão passar para a posição e manter essa posição. Se uma força externa for feita contra o servo enquanto o servo está mantendo uma posição, o servo irá resistir de mudar de posição. O montante máximo de força que o servo pode exercer é chamado a classificação de servo torque. Os servos não vão segurar sua posição para sempre embora; o impulso de posição devem ser repetidas para instruir o servo para ficar em posição.
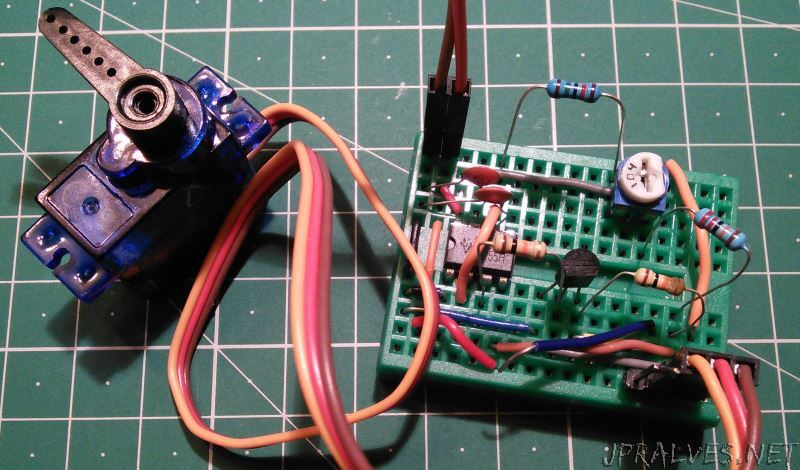
Este circuito construído com recurso a um IC 555, permite que ao mudar a posição do trimmer de 100K, alterar a posição do servo.
Esquemático
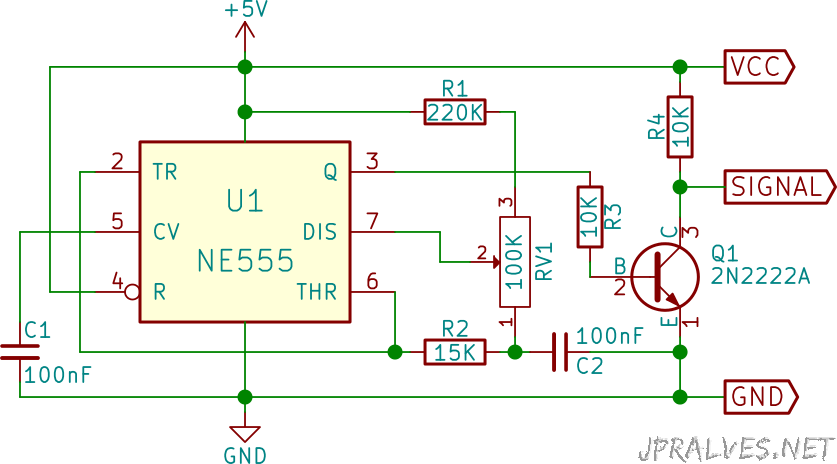
Componentes (BOM)
- 1x IC NE555
- 1x Resistência de 220K Ohms (R1)
- 1x Resistência de 15K Ohms (R2)
- 2x Resistências de 10K Ohms (R3, R4)
- 1x Resistência variável de 100K Ohms (RV1)
- 1x Transístor NPN 2N2222A (Q1)
- 2x Condensadores Cerâmicos de 100nF (C1, C2)
- 1x Servo (HXT900)
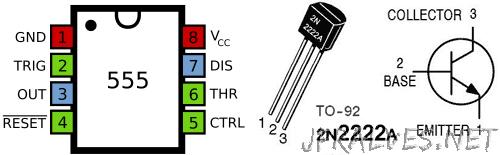
Pin-out dos IC/Componentes