

Other
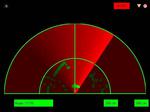
“A radar built using Power-KI, Arduino and LIDAR-Lite sensor. This project is built with: Power-KI, an Arduino Uno, a Servo motor and the LIDAR-Lite sensor. LIDAR-Lite is a compactoptical distant measurement sensor, in this project …

“If you think the second robot in the picture doesn’t look stable enough, you”ll be surprised. Main topic of this article is going to be SLAM and mapping with ROS. We’ll use Bittle, an agile quadruped robot …

“Donkey Car featuring the Ultra96 board, a Raspberry Pi, FPGA accelerated stereo vision, MIPI CSI-2 image acquisition, a LiDAR sensor and AI. In this project, I will document the build of a Donkey Car enhanced with an advanced vision …