
“Researchers from the University of Tsukuba, Japan, have developed a microfluidic platform that controls droplet movements and jumps. The process involves placing droplets on a hydrophobic mesh and focusing ultrasonic waves onto them. The platform can allow basic operations such as parallel manipulation, merging, and splitting of multiple droplets. This work demonstrates the potential of the platform for various applications, including chemical and biological experiments.
As science races toward automation and quick experiments, it is sometimes required to concurrently handle small amounts of liquids (droplets), from picoliters to microliters. Moreover, droplet jumping is required when transporting droplets to distantly positioned devices or containers. However, the digital microfluidic technology, which manipulates droplets on a surface, is constrained to a maximum height of approximately 5 mm.
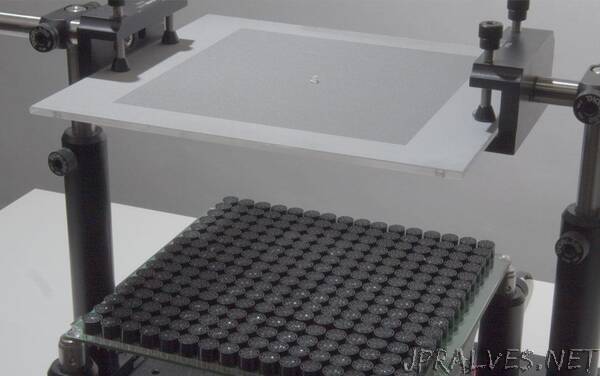
Herein, the researchers designed a new microfluidic platform that harnesses the remote force of ultrasound, known as the acoustic radiation force, to manipulate droplets. They discovered that a hydrophobic mesh can support droplets while allowing sound waves to pass through them. Notably, they found that droplets are drawn to areas with high sound pressures, even in the air. This enables manipulation of droplets on the mesh using ultrasonic waves, allowing droplet jump heights of up to 128 mm. Moreover, the direction of the jump can be controlled, making it possible to move droplets to a neighboring device or another level. In addition, droplets can be moved horizontally, merged, and split, which are essential functions for any digital microfluidic platform. To illustrate the potential of the platform in scientific experiments, the Suzuki-Miyaura cross-coupling reaction was performed on this platform and its suitability for biological experiments was also demonstrated.
The findings from this research could pave the way for the development of three-dimensional displays and automated experimental systems.
This work was supported by JSPS KAKENHI Grant Number JP21K14103, ERATO (JPMJER1502, JPMJER1903), and JST-Mirai Program (JPMJMI21G8) from the Japan Science and Technology Agency.”