
“Consider the lizard. Those that climb need to be both fast and stable to avoid predation and find food. A robot made to mimic their movements has shown how the rotation of their legs and the speed at which they move up vertical surfaces helps them climb efficiently.
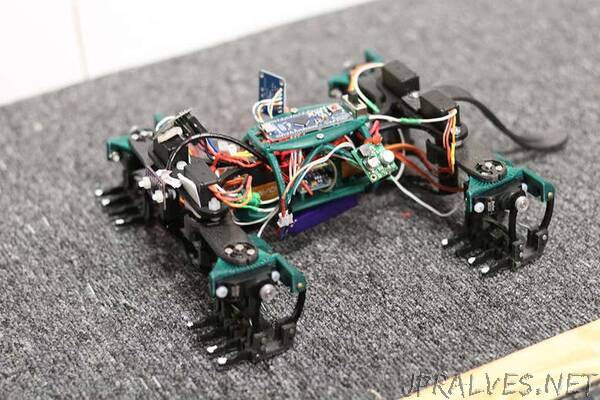
“Most lizards look a lot like other lizards,” says Christofer Clemente at the University of the Sunshine Coast, Australia. To find out why, Clemente and his team built a robot based on a lizard’s body to explore its efficiency. It is about 24 centimetres long, and its legs and feet were programmed to mimic the gait of climbing lizards.
They pitted the robot against common house geckos (Hemidactylus frenatus) and Australian water dragons (Intellagama lesueurii), filming them as they completed a vertical climbing test on a carpeted wall. “We thought, what if we could make a lizard take on any shape we wanted and see how it climbed,” says Clemente.
The researchers found that the best way for both lizards and robots to increase the distance they climbed was to take a Goldilocks approach – not too fast and not too slow. When the robot climbed while moving at more than 70 per cent or less than 40 per cent of its maximum speed, it had a 50 per cent chance of falling. In the sweet spot between those speeds, it always stayed on the wall. The lizards climbed at 60 to 80 per cent of their maximum running speed to maintain their grip.
The robot had 100 per cent success at staying on the wall when its forelimbs were rotated outwards 20 degrees and its hind limbs 100 degrees. It also held fast to the wall when its limbs were rotated inwards at the same angles.
“It works equally as well if you rotate inwards or outwards, but we only see outward rotations in nature,” says Clemente.
They also found that the robot could climb the furthest when it combined limb movements with a side-to-side spine motion. But the spine could only flex around 50 degrees before the limbs had to move as well to increase stability. Although it could also move by solely rotating its spine, the most efficient movement came from large amounts of limb movement and small spine movements.
Looking at the lizards’ phylogenetic trees showed that ancient terrestrial tetrapod linages, such as salamanders, exclusively use rotations in their spine to move, but modern climbing lineages move their limbs to extend their reach more. “Evolution was following the same gradient as our robot, moving towards this optimum,” says Clemente.
He says this shows that some lizards have found the optimum movements for climbing and that this could help build more advanced climbing machines. “If we want to build more efficient robots, the first place we should be looking is nature.”
Journal reference: Proceedings of the Royal Society B, DOI: 10.1098/rspb.2020.2576”