
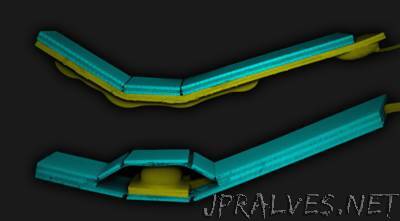
“Flexible endoscopes can snake through narrow passages to treat difficult to reach areas of the body. However, once they arrive at their target, these devices rely on rigid surgical tools to manipulate or remove tissue. These tools offer surgeons reduced dexterity and sensing, limiting the current therapeutic capabilities of the endoscope. Now, researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering at Harvard University have developed a hybrid rigid-soft robotic arm for endoscopes with integrated sensing, flexibility, and multiple degrees of freedom. This arm — built using a manufacturing paradigm based on pop-up fabrication and soft lithography — lies flat on an endoscope until it arrives at the desired spot, then pops up to assist in surgical procedures. The research is described in Advanced Materials Technologies.”