
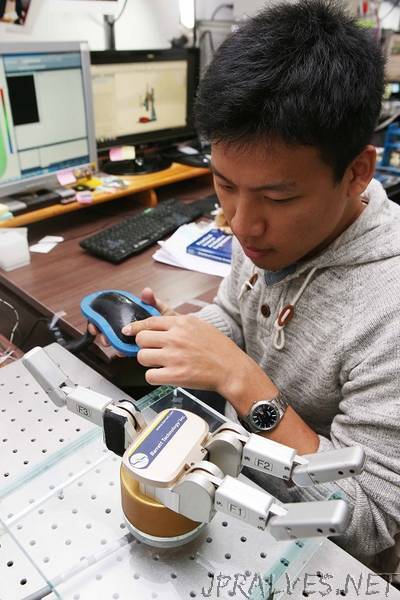
“A joint research team of Prof. Jung Kim and Prof. Inkyu Park of ME department, KAIST has developed a tactile sensor that can act as a skin for a robot using silicon and carbon materials. This technology is able to distinguish various types of tactile sensations while being capable of shock absorption, and is expected to be used as a skin for a robot in the future. The results of this research, which Dr. Hyosang Lee participated as the 1st author, were published online in the January 25 issue of Nature’s sister journal, Scientific Report. Skin is the organ that occupies the most part in the human body. It protects major organs from external impacts and measures and divides sensitive tactile information and transmits it to the nervous system. Currently, robotic sensory technology is close to human ability in visual and auditory areas, but in the case of tactile senses, it is much inferior to skin ability to detect environmental changes in the whole body. In order to apply human-like skin to robots, it is essential to develop skin sensor technology that absorbs shocks with high elasticity. The technology of connecting many sensors distributed throughout the body through electrical wiring is also a problem to be solved. The team combined silicone elastomer and carbon nanotubes (CNTs) to create a composite material, and combined it with a medical imaging technique called electrical impedance tomography (EIT). This has led to the development of technologies that can distinguish various types of forces applied to a large area without electrical wiring. The robot skin developed through this can withstand the strong impact of the level hit by the hammer. Even if part of the sensor is damaged, it can be reused by filling the damaged part with the composite material and hardening it. It can also be fabricated by filling silicone-nanotube composite material into a 3D shaped frame made of 3D printer. It is possible to create a new type of computer interface by making various 3D curved surfaces as well as existing 2D flat plates. This technology is expected to be applicable to the skin of a robot capable of absorbing shocks, a three-dimensional computer interface, and a tactile sensor, which can tactically distinguish other positions and sizes. In particular, the research was conducted jointly by Prof. Inkyu Park, an expert in nanostructures and sensors, and Prof. Jung Kim, an expert in bio-robotics. Prof. Kim said, “Flexible tactile sensors can be attached directly to the human body and can provide information on multidimensional deformation states. We will contribute to the field of soft robot industry including robotic skin and wearable medical devices.” Prof. Inkyu Park said, “The fusion of functional nanocomposites and computed tomography has enabled the next generation user interface.” This research was carried out through the collaboration of the first author Dr. Hyosang Lee, Mr. Dongwuk Kwon, and Mr. Jiseung Cho, and supported by National Research Foundation of Korea.”
Link to article